고정밀 GNSS 위치결정
고정밀 GNSS 위치결정에 대해 확인해보세요.
▶ 출처 │ 국토지리정보원, 2017, 최신도입 네트워크 RTK 활성화 방안 연구보고서
DGNSS
DGNSS(Differential GNSS)는 차분(differential) 측위법에 의해 GNSS 관측값을 처리하는 다양한 측위법들을 말합니다. DGNSS 신호에는 GNSS 코드 관측값에 대한 보정값(PRC: Pseudorange Correction)과 기준국의 위치 정보에 해당하는 RTCM 메시지 Type 1(Differential GPS Corrections)과 Type 3(GPS Reference Station Parameters)이 포함되는 것이 일반적이며, 반송파 위상에 대한 보정값은 포함하고 있지 않습니다. (2019년 12월 수정) 코드 관측값에 대한 보정값은 곧 GNSS위성과 기준국의 GNSS 안테나 사이의 거리에 대한 추정값인 의사거리에 대한 보정값입니다. 이 값은 기준국 위치를 기준으로 계산된 값이기 때문에 이동국과 기준국의 거리를 고려하여 이동국 위치에서의 보정값을 산술적으로 계산하는 과정을 거쳐서 이동국 수신기에 적용됩니다. 하지만 이러한 계산 과정은 이동국과 기준국의 거리가 가까울 때는 정확하나, 거리가 멀어질수록 부정확해지기 때문에 기준국으로부터 일정한 거리 내에 있을 때에만 정확도가 보장된다고 할 수 있습니다.
- 이동국의 위치를 고려한 기준국 선정
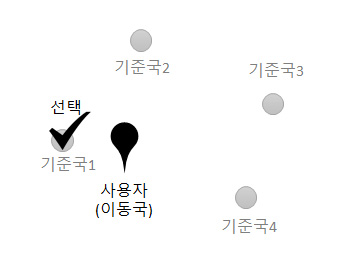
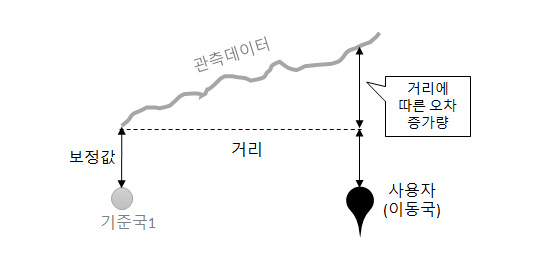
- 이동국과 기준국 사이의 거리 증가에 따른 오차량의 증가
DGNSS 보정신호를 사용하기 위해서는 GNSS 수신기 사용자가 활용할 기준국을 직접 선택하거나 GNSS 수신기의 개략적인 위치를 기반으로 기준국을 자동 선택하는 과정을 거쳐야 합니다.
DGNSS 보정신호의 정확도는 기준국과 이동국 사이의 거리 멀어질수록 저하됩니다. 보정해야 하는 오차량이 거리에 따라 변화하기 때문에 기준국으로부터 특정 거리 이상 멀어질 경우에는 이동국의 위치 정확도가 저하될 수 밖에 없습니다. 따라서 이동하는 위치를 결정해야 하는 경우에는 사용대상 기준국을 계속해서 선정해야 하는 불편함이 발생하게 됩니다. 기준국 선정의 불편함은 자동화된 프로세스의 구현을 통해 시스템 적으로 해결할 수 있으나 거리 증가에 따른 정확도 저하 문제는 DGNSS 보정신호 사용에 있어서 장애요인으로 작용해 왔습니다.
DGNSS 보정신호 사용상의 문제점을 극복하기 위해 제시된 두 가지 방법이 있습니다. 첫 번째 방법은 기준국의 위치에 종속되지 않는 새로운 종류의 보정신호를 개발하는 것이었으며 그 결과로써 개발된 보정신호가 SSR 방식의 SBAS 보정신호입니다. 두 번째 방법은 네트워크 방식의 보정신호 계산 방법으로서 이동국 주변의 여러 기준국 정보를 모두 사용하여 이동국에 적합한 보정신호를 계산하는 것입니다.
RTK
OSR방식으로 계산된 RTK 보정신호는 GNSS 신호 중 반송파 데이터를 중심으로 하는 실시간 정밀 위치결정 작업을 지원합니다. 같은 OSR 방식의 보정신호인 DGNSS 신호가 코드 데이터를 이용한 위치결정을 지원하는 정보들로 구성된 반면에, RTK 보정신호는 반송파 데이터를 중심으로 하는 위치결정을 지원합니다. 신호의 특성상 반송파 데이터의 관측 주기가 매우 짧기 때문에 보다 정밀한 위치결정 작업을 지원 할 수 있습니다. 따라서 RTK 보정신호를 이용하여 결정한 좌표는 수 cm 수준의 오차범위를 나타냅니다.
RTK 보정신호는 기준국 정보, 반송파 데이터, 코드 데이터 및 기타 데이터로 구성되며 RTCM 2.0 프로토콜을 기준으로 구성정보의 내용을 정리하면 아래 표와 같습니다.
전리층과 대류층 오차
OSR방식으로 계산된 RTK 보정신호는 GNSS 신호 중 반송파 데이터를 중심으로 하는 실시간 정밀 위치결정 작업을 지원합니다. 같은 OSR 방식의 보정신호인 DGNSS 신호가 코드 데이터를 이용한 위치결정을 지원하는 정보들로 구성된 반면에, RTK 보정신호는 반송파 데이터를 중심으로 하는 위치결정을 지원합니다. 신호의 특성상 반송파 데이터의 관측 주기가 매우 짧기 때문에 보다 정밀한 위치결정 작업을 지원 할 수 있습니다. 따라서 RTK 보정신호를 이용하여 결정한 좌표는 수 cm 수준의 오차범위를 나타냅니다.
RTK 보정신호는 기준국 정보, 반송파 데이터, 코드 데이터 및 기타 데이터로 구성되며 RTCM 2.0 프로토콜을 기준으로 구성정보의 내용을 정리하면 아래 표와 같습니다.
| 구분 | RTCM 2.3 | RTCM 3.1 | |
|---|---|---|---|
| 기준국 정보 | 기준국 파라메터 | #3 GPS Reference Station Parameter | #1005, #1006 |
| 기준국 안테나 정보 | #23 Antenna Type Definition Record | #1007, #1008 | |
| #24 Reference Station Antenna Reference Point Parameter | #1005, #1006 | ||
| 관측 데이터 정보 | 기준국 반송파 데이터 | #18 RTK Uncorrected Carrier Phase | #1004 (GPS), #1010 (GLONASS) |
| #20 RTK Carrier Phase Corrections | #1005, #1006 | ||
| 기준국 코드 데이터 | #19 Uncorrected Pseudo Ranges | #1005, #1006 | |
| #21 RTK/High Accuracy Pseudo Range Corrections | #1005, #1006 | ||
위의 표를 보면 RTK 보정신호가 OSR 방식의 보정신호이기 때문에 위치 결정의 기준으로 사용되는 기준국의 위치, 장비, 고유식별자에 대한 정보가 포함되어 있는 것을 알 수 있으며 기준국에서 측정한 반송파 데이터와 코드 데이터가 포함되어 있는 것을 확인할 수 있습니다.
RTK 보정신호는 높은 정확도로 사용자 수신기의 위치결정 작업을 지원할 수 있으나 OSR 방식으로 계산된 보정신호의 한계로 인하여 사용자의 위치가 기준국으로부터 멀어질수록 정확도가 저하되는 단점을 나타냅니다. 이러한 단점을 보완하기 위하여 개발된 보정신호가 네트워크 방식으로 RTK 보정신호를 계산하여 생성할 수 있는 네트워크 RTK 보정신호입니다.
▶ 출처 │ 국토지리정보원, 2017, 최신도입 네트워크 RTK 활성화 방안 연구보고서
네트워크 RTK
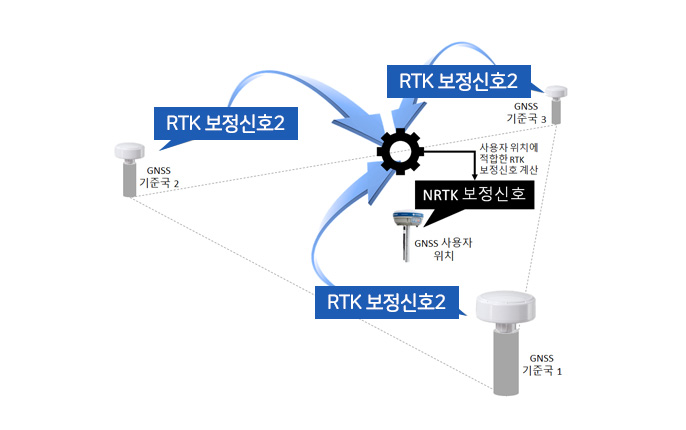
GNSS 네트워크 방식으로 계산한 RTK 보정신호인 네트워크 RTK 보정신호는 사용자가 위치한 지점의 인근에 배치된 다수의 기준국들로부터 RTK 보정신호를 수집한 후 이를 종합적으로 활용하여 사용자 위치에 적합한 RTK 보정신호를 계산하는 방식으로 생성됩니다. 여러 기준국에서 계산한 정보들을 활용하여 사용자 위치에 적합한 RTK 보정신호를 계산하기 때문에 일반적인 RTK에 비하여 보다 넓은 지역에 적용할 수 있는 보정신호를 생성할 수 있다는 장점을 가지고 있습니다. (2019년 12월 수정)
네트워크 RTK 보정신호는 계산 방법과 신호의 구조에 따라 여러 종류로 구분할 수 있으며 각각에 대하여 설명하면 다음과 같습니다.
- NRTK 보정신호 계산의 개념
VRS 방식의 네트워크 RTK
VRS(Virtual Reference System)방식의 네트워크 RTK 보정신호는 네트워크 RTK 시스템이 다수 기준국에서 관측한 정보를 이용하여 사용자 위치에 적합한 RTK 신호를 계산하는 방식으로 계산되며 그 형식은 RTK 보정신호와 동일합니다.
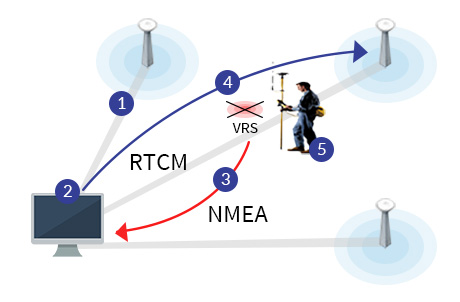
- 기준국은 GPS데이터를 수신하고 제어국으로 전송
- 제어국은 수집된 기준국 데이터를 통해 보정치를 생성
- 사용자는 제어국으로 현재 위치 정보를 전송
- 제어국은 사용자가 요청한 위치에 해당하는 보정치를 전송
- 전송 받은 보정치를 통해 정밀 좌표를 획득
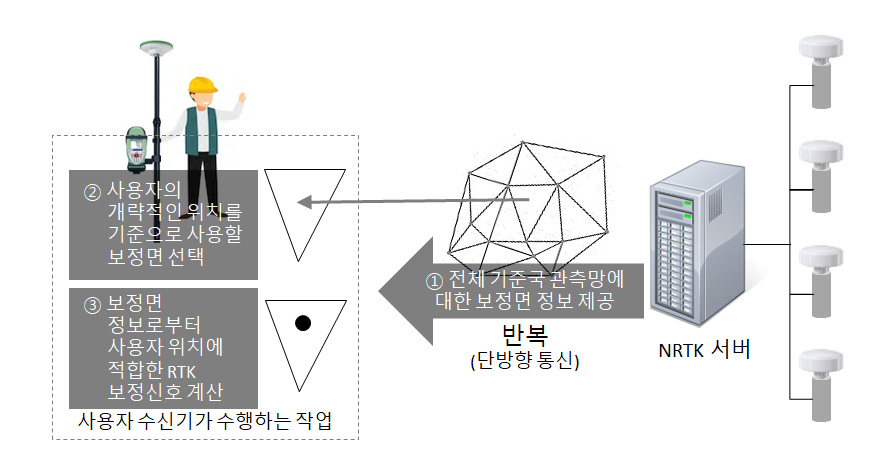
VRS 방식의 네트워크 RTK 보정신호를 사용하기 위해서는 위의 그림과 같이 사용자의 GNSS 수신기가 자신이 수신한 GNSS 위성신호만을 이용하여 결정한 개략적인 위치정보를 먼저 네트워크RTK 서버에 제공하여야 합니다. 이후 네트워크RTK 서버는 제공된 위치정보에 근거하여 가장 인접한 5개 이상의 기준국들을 선정하고 해당 기준국들의 정보를 활용하여 사용자 위치에 가장 적합한 RTK 보정신호를 생성하여 제공합니다. 이처럼 개략적인 사용자 위치정보의 제공과 해당 위치에 적합한 RTK 보정신호의 계산∙제공 과정이 실시간 반복되며 사용자의 정밀한 위치결정을 보조하게 됩니다. (2019년 12월 수정)
VRS 방식은 양방향 방식으로 네트워크 RTK 시스템은 GNSS 관측소의 데이터를 실시간으로 수집하여 GNSS 네트워크의 오차 모델링을 지속 수행하고 있다가, GNSS 측위 사용자가 자신의 위치를 NMEA GGA 형식으로 보내오면, 해당 지점에 마치 GNSS 위성기준점이 있는 것과 유사한 GNSS 관측데이터를 생성하여 전달합니다. 이러한 방식은 네트워크 RTK 시스템이 보정신호 계산 작업을 서버서 수행하고 사용자의 위치 정보를 지속적으로 서버에 전송하여야하기 때문에 양방향 통신환경 하에서만 활용할 수 있습니다. 또한 서버가 사용자 위치에 적합한 보정신호의 계산을 지속적으로 수행하여야하기 때문에 사용자의 수가 증가할수록 서버의 연산 부담이 크게 증가할 수밖에 없습니다. 이로 인해 사용자가 증가할수록 서버의 용량을 증가시켜야 하는 부담이 따르게 됩니다. 하지만 이러한 제약조건에도 불구하고 VRS 방식의 네트워크RTK 보정신호 제공체계는 보정신호의 정확도를 안정적으로 유지할 수 있기 때문에 여러 국가에서 활용되고 있습니다. (2019년 12월 수정)
GNSS 시스템이 발전함에 따라 네트워크 RTK 시스템 역시 발전하였습니다. GNSS 위성수가 많아지고, 위성기준점이 많아질수록 차분방식을 사용할 경우, 위성기준점감 기선해석을 위한 모호정수 결정을 위해 더 고사향의 전산자원이 필요합니다. 따라서 멀티 GNSS 환경, 늘어나는 위성기준점을 이용한 멀티 GNSS 네트워크 RTK 솔루션의 제공을 위해서는 차분방식이 아닌 정밀단독측위 방식을 사용한 GNSS 네트워크 RTK 솔루션 생성이 필요합니다.
- Increase of satellites and signals
- More stations desired in Lager networks
- Leads to an increase in unknowns in Least Squares Estimation
- One way of handling CPU load is to introduce absolute positioning and ambiguity Resolution instead of differential
| Year | Constellation | Stations | Sats | Signals | Unknowns | CPU Scale Factor | Reduced CPU by RTX |
|---|---|---|---|---|---|---|---|
| 1998 | GPS | 100 | 8 | 2 | 1700 | 1 | 1 x 10 x4 |
| 2005 | GPS+GLN | 100 | 20 | 2 | 4300 | 14 | 14 x 10 x4 |
| 2017 | ALL (EU) | 100 | 40 | 3 | 12100 | 361 | 3.61 x 10 x2 |
| 2017 | ALL (APAC) | 100 | 50 | 3 | 15100 | 693 | 6.93 x 10 x2 |
| 2020 | ALL | 100 | 50 | 4 | 100500 | 207158 | 8.21 |
▶ 출처 │ The Future of Real-Time Networks, 2017, Trimble EMEA 2017 Real-Time Network User Conference
FKP 방식의 네트워크 RTK
VRS 방식이 특정 지점에 대한 보정신호를 제공하는 반면에 FKP((독)Flachen Korrektur Parameter; (영)Area Correction Parameter)방식은 기준국들이 형성하는 관측망 전체에 적용할 수 있는 보정신호를 제공합니다.
- FKP 방식 NRTK 보정신호의 대표적인 활용 개념
MAC 방식의 네트워크 RTK
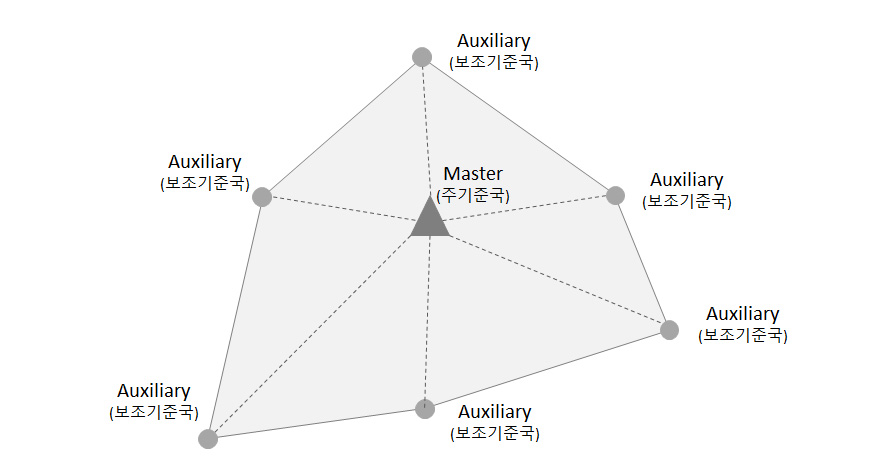
MAC(Master Auxiliary Concept) 방식의 보정신호는 주기준국(master station)과 인접한 다수의 보조기준국(auxiliary)들로 구성되는 셀 단위의 보정신호입니다(우측 그림). 보조기준국들은 주 기준국을 중심으로 약 100km 이내의 범위에 위치하여야 합니다. MAC 방식 보정신호의 주기준국 부분은 GNSS 관측데이터를 모두 포함하고 있으며 보조 기준국 부분은 주 기준국 데이터를 보조하기 위한 사전 데이터 분석 결과들로 구성됩니다.
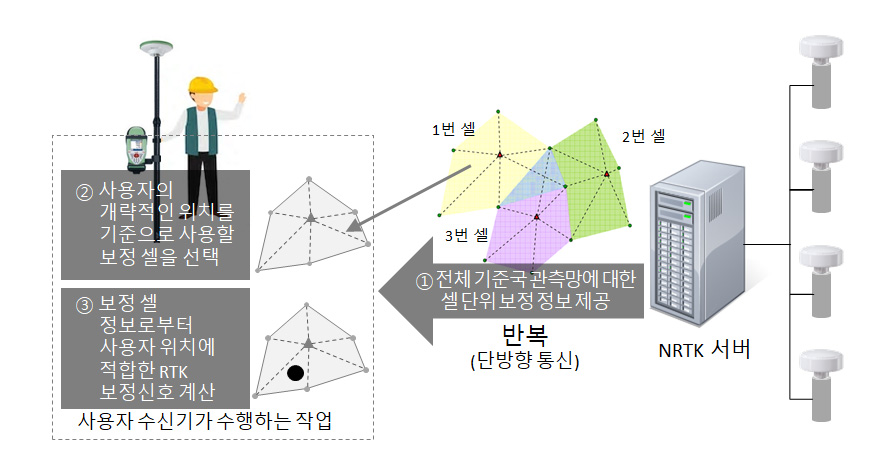
아래의 그림에 나타낸 바와 같이 MAC 방식의 보정신호를 제공하는 네트워크 RTK 서버는 다수의 셀에 대한 보정신호를 통합하여 제공합니다. 사용자 수신기는 통합된 정보를 수신한 이후 자신의 개략적인 위치를 기준으로 특정 셀에 대한 정보를 선택한 후 셀로부터 RTK 보정신호를 추산하여 위치결정 작업에 활용합니다.
- MAC 방식 보정 신호의 기본 단위인 셀의 구성
MAC 방식의 보정신호는 셀 영역 내의 모든 지점에 대한 보정정보를 제공할 뿐만 아니라 기존 방식에 비해 충분한 양의 정보를 전달함으로써 정밀한 위치 결정 작업을 안정적으로 제공할 수 있습니다. 서비스 범위 내의 모든 셀들에 대한 보정정보를 통합하여 제공할 수 있기 때문에 단방향 통신 환경에서 운영할 수 있으며 사용자 수신기에 적합한 보정신호의 계산을 수신기가 부담하는 구조이기 때문에 일정 규모의 서버 용량으로도 많은 수의 사용자들을 지원할 수 있습니다.
- MAC 방식 NRTK 보정 신호의 대표적인 활용개념
위의 그림에 나타낸 바와 같이 FKP 방식의 보정신호는 3개의 인접한 기준국들로 구성된 삼각망 별로 보정신호를 생성합니다. 각 삼각망에 대한 보정신호는 삼각망 내의 모든 지점에 적용할 수 있는 보정정보를 포함하고 있으며 네트워크 RTK 서버는 여러 삼각망에 대한 보정정보를 종합하여 사용자 수신기에 제공합니다. 따라서 삼각망의 수가 많을수록 보정신호의 용량은 증가하게 됩니다.
▶ 출처 │ 국토지리정보원, 2015, 글로벌 환경변화 대응을 위한 GNSS 인프라 진단 연구
PPP-RTK
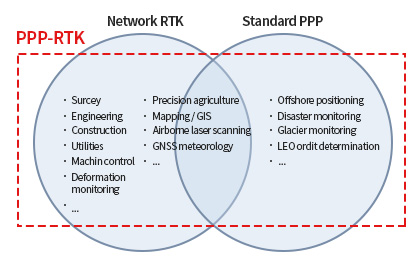
PPP(precise point positioning) 측위방식과 RTK 측위방식을 결합한 PPP-RTK 측위 기술은 기존의 네트워크 RTK에 비하여 시스템 구축비용이 저렴하고 사용자 수의 제한 없이 1~2cm의 정확도를 확보할 수 있는 측량기술입니다.
PPP-RTK 측위기술은 중앙 제어국에서 기준국 네트워크의 관측 자료를 이용하여 GNSS 측위관련 다양한 오차 성분(전리층∙대류권 오차, 위성시계∙궤도 오차 등)을 계산한 후 사용자에게 보정정보를 제공함으로써 RTK 기준국을 별도로 설치할 필요 없이 정밀하게 위치를 결정할 수 있는 새로운 측위기술을 말합니다. 오차소거와 관련하여 기준국 원시자료를 수신하여 이중차분을 통해 오차를 소거하는 RTK 방식과 달리 PPP-RTK 방식은 중앙제어국에서 기준국 네트워크 원시자료를 활용하여 위성관련 오차, 이온층 및 대류권 오차를 산출하여 사용자에게 제공함으로 사용자는 단독으로 정밀한 위치결정을 할 수 있게 되었습니다.
현재는 PPP-RTK 측위 작업에서 필요로 전체 오차정보들 중 일부분에 대해서만 표준화가 되었습니다. 제공되는 오차정보의 종류가 적은 경우 PPP-RTK 측위보다 정확도와 성능이 낮은 DF-RT-PPP / SF-RT-PPP측위를 수행할 수 있습니다.
2007년 중반까지만 해도 PPP 해석은 대부분 GPS 위성만으로 수행되었지만 오늘날 다양한 GNSS 위성들의 사용으로 조합에 의한 PPP 해석 연구가 활발히 진행되고
있습니다.
최근에는 전 지구 GNSS 상시관측망을 운영하는 해석센터에서 계산한 보정정보를 NTRIP(networked transport of RTCM via internet
protocol) 방식으로 전송하여 실시간 정밀절대측위의 정확도 향상을 위한 연구와 RTKLib 등과 같은 운용 프로그램의 연구가 활발히 진행되고 있습니다. 또한,
PPP-RTK 측위기술의 대표적인 서비스인 IGS(international GNSS service)에서는 RTS(real-time service)를 위하여 전 세계 GNSS
상시관측망 자료인 위성기준점과 분석센터를 종합 해석하여 정밀 위성궤도력, 위성시계의 보정값 및 전리층 보정모델 등의 품질 향상과 산출 주기 단축 등 지속적인 서비스를
제공하고 지구물리 모니터링, 재해 감지∙경고 및 일기예보 등 다양한 분야에서 활용되고 있습니다.
| <표 2, 3> 제공되는 오차정보의 종류에 따른 구현 가능 PPP 측위법의 종류 | |||
|---|---|---|---|
| 단계 | 제공되는 오차정보의 종류 | 구현 가능 측위 | 성능 |
| 1 | 위성 궤도오차, 위성 시계오차, 코드데이터 바이어스 |
DF-RT-PPP · DF:Dual Frequency (2주파 수신기) · RT:Real Time |
고가의 2주파 수신기를 이용한 약 30cm(1σ) 오차 범위 위치 결정 |
| 2 | 1단계의 오차, 이온층 연직 지연량(VTEC), 반송파데이터 바이어스 |
SF-RT-PPP · SF:Single Frequency (2주파 수신기) · RT:Real Time |
저가의 1주파 수신기를 이용한 약 30cm(1σ) 오차 범위 위치 결정 |
| 3 | 1단계의 오차, 2단계의 오차, 이온층 경사 지연량(VTEC), 대류층 지연량 |
PPP-RTK | 저가의 1주파 수신기를 이용한 수 cm(1σ) 오차 범위 위치 결정 |
▶ 출처 │ 한국항행학회논문지, 2014, GIPSY-OASIS기반 LX GNSS 온라인 자료처리 시스템 개발
위성항법시스템을 이용한 위치결정은 초기의 군사적 목적을 벗어나 민간분야에도 활용 범위가 확대되고 있으며, 이를 위한 다양한 종류의 자료처리 프로그램이 개발되고 있습니다. 특히 수신기를 제작하거나 공급하는 기업에서는 개발 수신기의 특성에 적합한 자료처리 프로그램을 개발해 상용 서비스 하고 있으며, 대표적으로 Trimble의 TBC(Trimble Business Center)와 Leica의 LGO(Leica Geo Office)를 들 수 있습니다. 이 프로그램은 좌표 산출 뿐만 아니라, 기선처리나 좌표 변환 등 사용자의 편의를 위한 다양한 기능를 포함하고 있습니다.
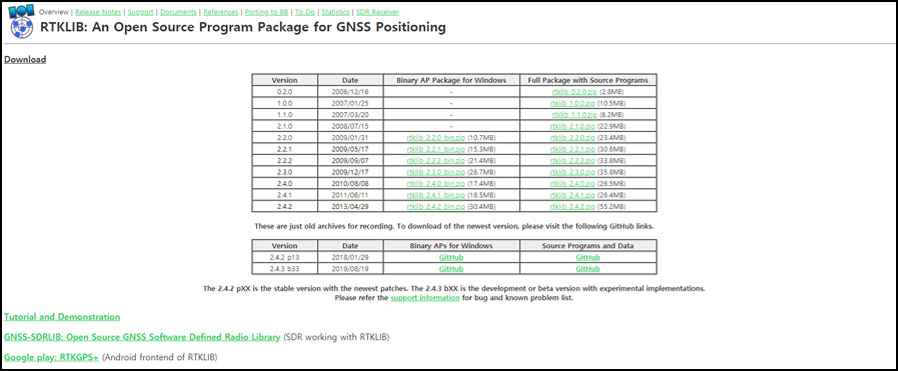
비상업용 자료처리 프로그램으로는 최근 활발하게 사용되고 있는 RTKLIB (www.rtklib.com)가 있습니다. 이 프로그램은 일본 동경대학교 연구팀에서 개발한 오픈소스 프로그램 패키지로, 2006년부터 개발이 시작되어 계속해서 업데이트되고 있습니다. RTKLIB는 대부분의 위성항법시스템의 자료처리가 가능하고 RTK(real time kinematic)와 DGPS(differential GPS), 정지측위와 이동측위, PPP(precise point positioning)등 관측방법에 따라 자료처리가 가능하기 때문에 다양한 연구 분야에 활용되고 있습니다.
이외에 고정밀 데이터 처리 프로그램인 GIPSY-OASIS와 Bernese는 과학기술연구를 목적으로 개발된 프로그램으로, NASA JPL (jet propulsion laboratory)과 스위스의 Berne대학에서 각각 개발하였습니다. 이 프로그램은 전문 위성 측위 분야뿐만 아니라 지각변동, 기후변화, 해양조석 등 GNSS 데이터 분석과 관련한 다양한 학술 연구에 사용되고 있으며, 국내에서도 연구기관과 대학교 등 여러 기관에서 고정밀 자료처리 프로그램을 이용한 연구를 수행하고 있습니다.
- gipsy-oasis.jpl.nasa.gov

- Bernese GNSS Software
최근에는 위치결정을 위한 솔루션 중 하나로, 인터넷을 이용한 온라인 자료처리 시스템이 개발되고 있습니다. 이 시스템은 보통 정부기관이나 연구기관에서 개발하며, 대부분 사용자에게 무료로 제공됩니다. 온라인 기반의 자료처리 시스템은 웹페이지를 통해RINEX(receiver independent exchange format)형태의 관측 파일을 받아 자료처리를 수행한 뒤 이메일로 결과를 전송하는 방식으로 운영됩니다. 대표적인 온라인 자료처리 서비스로는 호주의 AUSPOS와 NASA JPL의 APPS(automatic precise positioning service), NGS(national geodetic survey)의 OPUS(online positioining user service)가 있으며, 이는 전 세계 사용자를 대상으로 지역적 제한 없이 운영하고 있습니다.